Inspection d’infrastructures subaquatiques
“Consolider la filière technologique marine du créneau RSTM ACCORD Bas Saint-Laurent comme un leader dans le domaine de l’inspection d’infrastructures immergées.”
Contexte et objet de recherche :
Prenons quelques instant la place d’un gestionnaire en charge de l’entretien et de l’intégrité d’un port, d’un pont ou encore d’un barrage. Qu’aimerions-nous savoir ?
Nous aimerions connaitre l’état général de l’infrastructure, savoir où se situent ses éventuelles faiblesses, évaluer l’ampleur des dommages potentiels et ce afin de planifier au mieux les travaux nécessaires.
Traditionnellement, la surveillance des infrastructures est effectuée :
- Par l’emploi de capteurs internes (pendules, inclinomètres) à la structure (principalement dans le cas des barrages) permettant la surveillance en temps réel des déformations;
- Par l’inspection tactile conduite par des plongeurs;
- Par l’inspection visuelle à partir d’images vidéo recueillies pas des plongeurs ou des engins robotisés (ROV).
Or, depuis quelques années l’inspection « à distance » à l’aide de sonars multifaisceau, de sonars à balayage mécanique, de camera acoustique, de caméra optique (photogrammétrie) et de laser sous-marins s’est développée. Ces technologies permettent d’accroitre la rapidité des inspections par le recueil de jeux de données 3D (nuages de points) servant une modélisation globale des déformations voir même une analyse locale de certains défauts de structures.
Pour accompagner, au Québec, l’émergence de ces nouvelles pratiques, le CIDCO et de nombreux partenaires ont mis sur pied en 2013 un Pôle d’expertise en inspection d’infrastructures subaquatiques. Le Pôle s’est donné comme objectifs de :
- Consolider le savoir faire et poursuivre la R&D en inspection d’infrastructures;
- Transférer les connaissances acquises dans le cadre des travaux menés au Pôle vers : les propriétaires et gestionnaires d’infrastructures, les concepteurs de logiciels, les équipementiers et les fournisseurs de services d’inspection;
- Définir une norme (standard d’inspection) permettant aux donneurs d’ordres de correctement spécifier leurs travaux d’inspection et aux entreprises contractantes d’avoir un objectif de qualité bien défini.
Phase 1 (2013-2016)
La phase 1 du projet (2013-2016) s’est concrétisée par :
- la mise en place d’un mur de référence au port de Rimouski;
- la réalisation de plusieurs études ponctuelles, dont la plupart menées en collaboration avec les partenaires du Pôle;
- l’organisation de deux colloques dédiés (2013 et 2015).
Études réalisées dans le cadre de la phase 1 :
Incertitude des levés

Année : 2012
Partenaire : Port de Montréal/Mosaic3D
Thématique : Qualité des données
Publications reliées : Rondeau_CDA_2012 ; Rondeau_PortTech_2012 ; Rondeau_VisionGeom_2012
Afin d’évaluer la performance de la solution intégrée de levé Sonar-LiDAR proposée par le Centre interdisciplinaire de développement en cartographie des océans (CIDCO) et l’entreprise Mosaic3D à des fins d’inspection et de gestion de ses infrastructures portuaires, le port de Montréal a mandaté le CIDCO pour produire une représentation en 3 dimensions des faces de quais des sections 54 à 80 et 103.
Profitant d’une baisse des niveaux d’eau au port de Montréal entre juin 2011 et novembre 2011, une section de 2m par 4m du quai 55 du port de Montréal a été balayée à l’aide d’une station totale robotisée pour constituer une grille de référence de 740 points de contrôle répartis uniformément. Les nuages de points topographiques et bathymétriques acquis à l’aide du système LiDAR-Sonar évalué ici sont ensuite comparés à cette grille de référence afin d’en déduire l’incertitude.
Les incertitudes obtenues pour chaque nuage de points (LiDAR, sonar et combinés) sont présentées dans le tableau ci-dessous.

L’erreur systématique y est aussi montrée. Une valeur négative signifie que le nuage de points se situe devant la référence. Le sonar a donc tendance à sous-estimer sa distance au quai et le LiDAR, à la surestimer.
Puisque le client vise une incertitude de 5 cm (IC 95 %), il semble nécessaire de traiter les nuages de points afin d’en réduire l’écart-type. L’algorithme CUBE implémenté dans Caris-HIPS donnerait sans doute de bons résultats, mais le logiciel ne supporte pas encore les projections de surfaces sur un plan vertical. Un algorithme maison plus simple pourrait par contre être implémenté assez facilement et permettrait sans doute de répondre aux spécifications.
Étude comparative inspection plongeur vs MBES

Année : 2012
Partenaire : AxSub
Thématique : Stratégies de déploiement
Publication reliée : Plongeur-MBES_RapportInterne_2012
Il a été démontré que les technologies d’inspection à distance et l’inspection en plongée traditionnelle sont complémentaires. L’inspection à distance démontre un fort pouvoir de couverture, une bonne précision et une insensibilité à la visibilité et au courant. L’inspection en plongée se démarque par son fort pouvoir de résolution.
Prototype de génération de surfaces verticales

Année : 2013 -> 2015
Partenaires : Port de Montréal / Teledyne Caris
Thématique : Produits à valeur ajoutée
Publications reliées : Leblanc_Caris_2012 ; Rondeau_USHydro_2015
Le CIDCO a prototypé en 2013 un outil de traitement de données spécialement adapté pour les surfaces verticales dont le but est de permettre de travailler sur des modèles surfaciques (2D1/2) dont l’orientation est arbitraire. Cet outil permet donc de modéliser et d’analyser finement les modèles de parois verticales, et d’effectuer des cartes de déformation par rapport à une surface de référence (plan de génie civil, mesures d’arpentage de la partie aérienne de la structure).
Ce prototype a été repris et intégré dans le Engineering Analysis Module de Caris BaseEditor en 2014 grâce à un financement du Port de Montréal. Il a été présenté conjointement par Caris et CIDCO à l’occasion de la conférence USHydro15.
Ce module concrétise 3 ans de travail menés au CIDCO pour promouvoir la pertinence d’offrir aux gestionnaires d’infrastructures ainsi qu’aux ingénieurs la possibilité de produire à partir d’un nuage de points 3D un modèle de surface vertical pour faciliter l’analyse des déformations d’une structure immergée.
Développement de l’application GeoSketch

Année : 2013 -> aujourd’hui
Partenaires : Port de Montréal / Sygif International
Thématique : Stratégies de déploiement
Publications reliées : GeoSketch_RapportInterne_2013
Avec GeoSketch-Port, l’inspecteur peut remplacer sa feuille de papier par une tablette électronique et son galon à mesurer par une image rectifiée. La procédure est simple :
- Prendre une photographie. En arrivant sur zone, l’inspecteur utilise la caméra photographique intégrée à sa tablette électronique pour prendre une image de la surface à inspecter.
- Redresser la prise de vue. Le puissant moteur de redressement, porté par le noyau logiciel GeoSketch, lui permet en quelques clics de corriger les effets de perspective de la prise de vue ainsi que de mettre à l’échelle son image.
- Faire le dessin. L’inspecteur peut alors s’appuyer sur l’image redressée pour réaliser son dessin d’inspection. Il peut prendre des mesures (l’image redressée étant à l’échelle), ajouter des commentaires sur le dessin directement ou bien spécifiquement pour un bris en particulier.
- Exporter le plan. Le dessin est disponible au format DXF directement pour une utilisation ultérieure dans un logiciel de DAO si nécessaire.
Levé mur barrage Romaine 2

Année : 2014
Partenaires : IREQ (groupe robotique)
Thématique : Qualité des données
Publications reliées : Stoeffler_CDA_2015 ; Croteau_CIDCO_2015
Hydro Québec souhaitait effectuer une étude de validation de méthode numérique de calcul de déformation de l’ouvrage de Romaine 2 dans différentes configurations de chargement mécanique (barrage vide, barrage à demi rempli, et barrage rempli à sa cote d’exploitation).
Outre la mise en œuvre de différents systèmes de levés (LiDAR, MBES), le niveau de précision exigé pour suivre les déformations du barrage de Romaine 2 pose un certain nombre de problèmes qui ne relèvent pas de l’hydrographie standard. En effet, le niveau d’exactitude et de précision de mesure attendu est ici très élevé.
MBES (surface) vs BV5000 (fond)
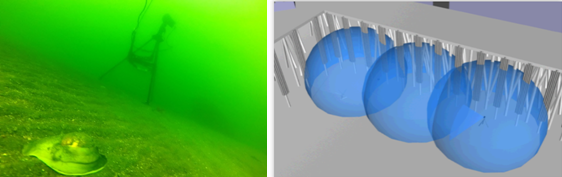
À gauche, BV5000 en acquisition sur son trépied au fond de l’eau. À droite, les 3 sphères représentent le volume maximal inspecté par le BV5000 sur 3 stations différentes.
Année : 2014
Partenaires : étude interne
Thématique : Stratégies de déploiement
Il est relativement clair que les capteurs acoustiques de type BV5000 permettent d’obtenir des images de détails que ne peuvent pas atteindre les multifaisceaux de surface. Toutefois deux problèmes essentiels restent un frein à leur utilisation :
- La difficulté et le temps de mise en œuvre (déploiement sur trépied, nécessité de cibles) ;
- Le traitement des points de contrôle et le traitement des nuages de points (« surface matching ») ;
- Le géoréférencement de la scène dans un repère géodésique absolu.
Les systèmes de surfaces présentent l’avantage de permettre des levés rapides des infrastructures subaquatiques et de déterminer des défauts globaux (verticalité par exemple), mais leur résolution et pouvoir de détection reste limité physiquement. Les caméras acoustiques, lorsqu’elles sont déployées plus près des structures permettent d’obtenir des nuages de point de meilleur résolution et donc de détecter la présence de défauts locaux de relativement petite taille. Cependant le recalage et le géoréférencement de ces images reste le principal problème et peut être très couteux en temps de déploiement.
ULS500
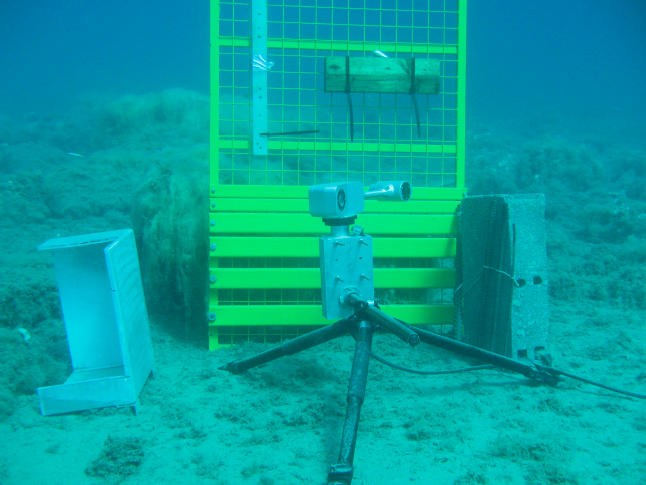
Déploiement d’un ULS500.
Année : 2014
Partenaires : 2GRobotics / ParcCanada
Thématique : Stratégies de déploiement
Publications reliées :
L’objectif du projet a été de déterminer les limitations d’emploi et/ou avantages des lasers sous-marins par rapport aux systèmes acoustiques, dans différents contextes d’emploi : montage sur véhicule mobile, environnements différents (notamment en ce qui concerne la turbidité) et scènes différentes.
Un ULS 500 monté sur trépied a été déployé par petit fond (Port de Rimouski). Des difficultés sont apparues, a priori liées à la trop forte turbidité de l’eau et aux conditions de luminosité du fond. L’ULS est un système qui triangule les réflexions d’un Laser vert à l’aide d’une caméra CCD dont on connait parfaitement l’orientation relative par rapport à la source Laser. Ainsi, l’image reçue par la caméra CCD (qui contient les points correspondant aux impacts du Laser sur les zones de forte réflectance par rapport à l’eau ambiante) permet de géolocaliser les points détectés relativement au repère local de l’ULS. La principale difficulté rencontrée a été la forte turbidité lors des tests en zone portuaire (Rimouski) et fluviale (Lyon, France). La conclusion de ces tests est négative en ce qui concerne l’utilisation des ULS en zone turbide. Les ouvrages faisant l’objet de travaux d’inspection étant majoritairement située en environnement turbide, il apparait que cette technologie est plutôt à écarter.
Étude comparative entre 3 MBES
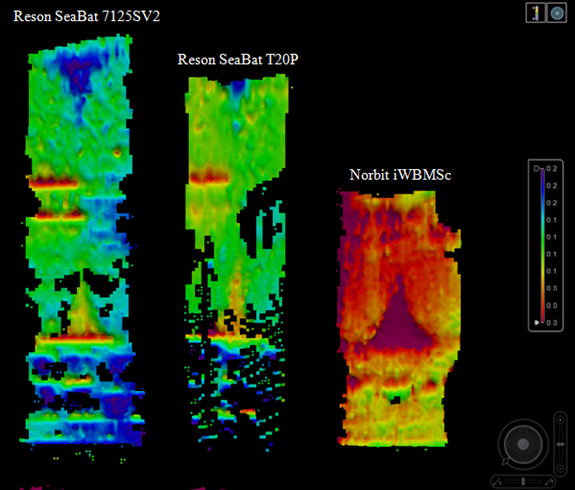
Comparaison de la capacité de détection de trois sondeurs multifaisceau sur le mur de référence de Rimouski.
Année : 2015
Partenaires : SeaHorse Geomatic, Teledyne Reson
Thématique : Qualité des données
Une question souvent posée par les gestionnaires d’infrastructures et les ingénieurs relativement à un système d’inspection est : « quelle est la taille du plus petit défaut (sous-entendu : fissure, protubérance) que vous êtes en mesure de détecter avec ce système ? »
Trois systèmes multifaisceaux opérés à partir de la surface ont été évalués dans le cadre de cette étude, soit :
- Le sondeur Reson SeaBat 7125SV2
- Le sondeur Reson SeaBat T20P
- Le sondeur Norbit iWBMSc
Pour chacun, nous avons mesuré :
- La plus petite fissure linéaire (verticale) détectée
- La plus petite protubérance linéaire (verticale) détectée
- Le plus petit trou détecté
- La plus petite protubérance cubique détectée
- La sensibilité au type de matériau (bois)
Porteur hydrographique tracté
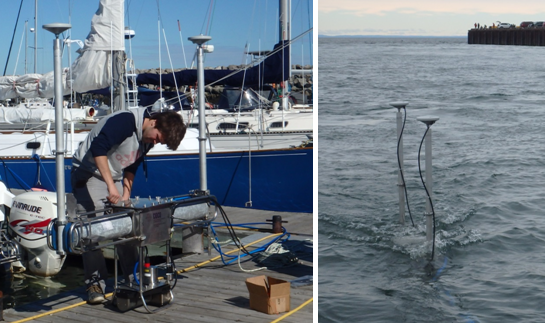
Porteur hydrographique tracté sur lequel est installé un sondeur Reson Seabat T20P.
Année : 2015
Partenaires : UQAR Chaire en Génie de la Conception
Thématique : Stratégies de déploiement
Publications reliées : Rondeau_TMTW_2015
La manière de calibrer et d’opérer un système d’inspection à un impact direct sur la qualité (précision, capacité de détection) et la fiabilité (exactitude du positionnement des défauts) des données collectées.
Un des principaux défis relativement au déploiement d’un système dans un contexte d’inspection d’infrastructures tient dans le montage et la calibration des éléments constitutifs du système sur la plateforme de sondage (le plus souvent une vedette hydrographique). La mesure précise et exacte des bras de levier (sondeur/IMU/GPS) et des angles de montage (sondeur/IMU) est déterminante.
Pour simplifier et verrouiller rigoureusement la phase de montage et de calibration de la plateforme, le CIDCO propose le recours à un porteur hydrographique tracté.
Démontable en 5 morceaux, pour être facilement transportable dans 2 valises, le porteur une fois assemblé mesure 1.7m de long par 0.25m de large par 1.70m de haut. Il est constitué d’un « hydropod » central sur lequel sont montés le sondeur multifaisceau, la centrale inertielle et la sonde de vélocité du son, ainsi que de 2 mats à l’extrémité desquels sont boulonnées les antennes GPS.
Dans le contexte de l’inspection d’infrastructure une telle plateforme précalibrée permet d’augmenter la réactivité de déploiement tout en limitant les coûts associés (gain de temps au montage, transport rapide sur site, seulement besoin d’une petite embarcation d’opportunité).
Inclinaison mécanique vs inclinaison électronique
Comparaison de la capacité de détection pour un sondeur incliné mécaniquement (à gauche) et un sondeur incliné électroniquement (à droite).
Année : 2015
Partenaires : étude interne
Thématique : Stratégies de déploiement
Dans le cadre de l’inspection d’infrastructures, il est assez naturel de vouloir orienter le sondeur multifaisceau vers la structure de manière à maximiser le nombre de faisceaux « utiles », c’est-à-dire ceux qui impacteront la structure, de manière à augmenter la capacité de détection.
Deux modes sont possibles :
- Soit on incline mécaniquement le sondeur, ce qui demande à utiliser une interface mécanique dédiée, et une installation spécifique ;
- Soit on utilise une fonctionnalité offerte par certains sondeurs multifaisceaux qui consiste à orienter les faisceaux de manière électronique par un processus de formation de voies. Cette dernière solution ne demande pas de réinstallation mécanique du sondeur et l’antenne de réception peut donc rester à l’horizontale.
L’inclinaison mécanique du sondeur permet une nette augmentation de la capacité de détection. Par contre la calibration dynamique (patch-test) d’un sondeur incliné mécaniquement est difficile. La méthodologie conventionnelle consistant à réaliser un patron de lignes sur un fond plat (roulis) et sur une pente (tangage, cap) ne permet pas de résoudre assez finement les angles de montage sondeur/IMU. Des résiduelles angulaires persistes. Le jeu de données est entaché d’une erreur systématique.
Les travaux s’attaquant à la problématique de la calibration automatique menés par le CIDCO permettent de calibrer précisément le couple sondeur/IMU quelle que soit son orientation. Des résultats préliminaires obtenus sur un jeu de données collectées sur le mur du barrage Romaine2 montrent le potentiel de cette approche.
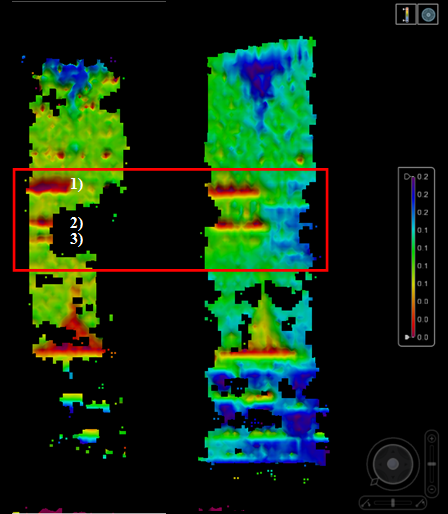
Détection et inspection d’affouillement
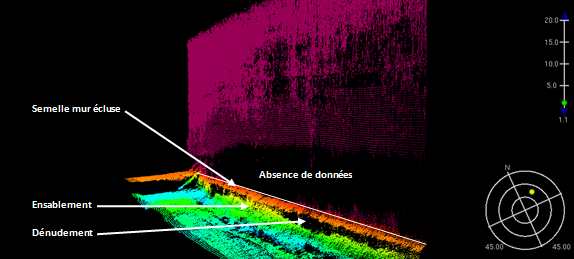
Ensablement/dénudement variable de la semelle du mur d’écluse -> validé par les plongeurs. Absence de données dans le bas du mur -> invalidé par les plongeurs.
Année : 2015
Partenaires : Corporation de Gestion de la Voie Maritime du Saint-Laurent / WSP Canada
Thématique : Stratégies de déploiement
Un levé à l’aide d’un sondeur multifaisceau Reson SeaBat 7125SV2 a été réalisé sur les sections amont et aval de l’écluse de St-Lambert (région de Montréal). L’objectif principal de ce levé était de fournir à l’ingénieur en charge du projet une évaluation générale de l’état de la structure, dans le but d’optimiser les plongées d’inspection. L’analyse du jeu de données bathymétriques menée sur site le jour suivant le levé (après un prétraitement des données) a permis d’identifier quatre zones d’affouillement potentiel pour la section aval et cinq pour la zone amont. Les plongeurs ont procédé à des plongées de vérification sur ces zones seulement.
La plupart des cibles identifiées dans le nuage de point sonar était pertinentes et l’intervention de l’équipe de plongeurs a ainsi pu être optimisée.
Toutefois, nous remarquons une absence de données dans le bas du mur sur certaines sections que les plongées n’ont pas réellement pu expliquer. Il s’agit probablement de la résultante d’un effet de coin (multi-trajet). Le mode « multi-detect » pour les sondeurs Reson semble permettre de corriger en partie cette aberration. Ce mode n’a pas été utilisé lors du levé à l’écluse St-Lambert.
Inspection par ASV

Utilisation d’un ASV CataRob pour réaliser un levé d’inspection à la marina de Rimouski.
Année : 2016
Partenaires : PingDSP ; Applanix
Thématique : Stratégies de déploiement
Un ASV CataRob a été modifié pour accueillir à son bord un sonar interférométrique PingDSP.